|
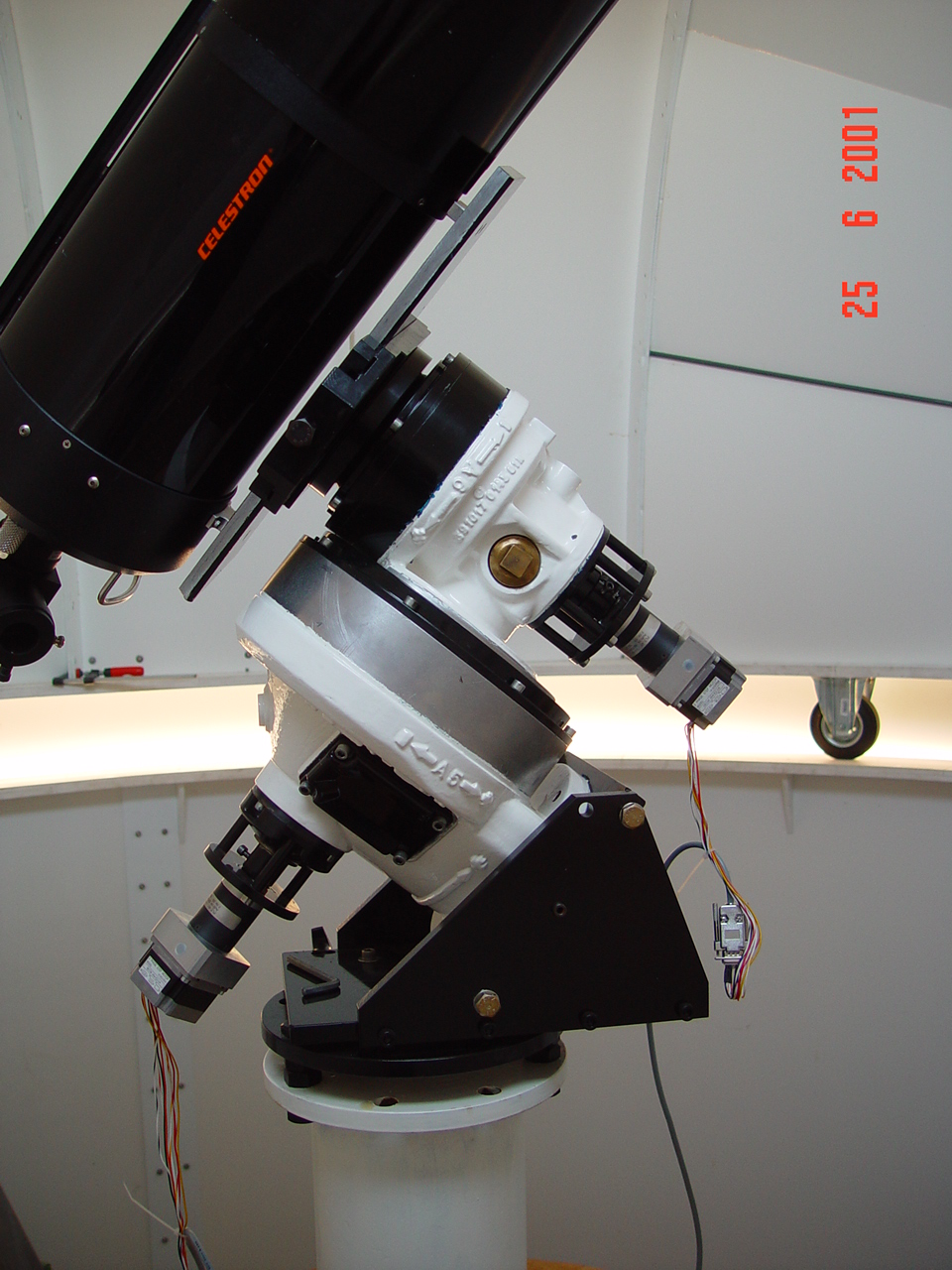
Eigenbaumontierung mit Harmonic- Drive- Getrieben und derzeit noch C8
Durch Zufall kam ich auf die Harmonic- Drives. Ich
wollte in einem Schweissereifachbetrieb ein Gehäuse schweißen lassen und entdeckte in einer Ecke der Halle etwa 20 Schweissroboter nutzlos stehen. Ursprünglich dachte ich daß so ein Roboter ja auch irgendwelche Winkelencoder haben müsste. Darauf hin Untersuchte ich die Roboter genauer. Nach einigen Verhandlungen mit dem Besitzer durfte ich mir einen Encoder zum testen abmontieren. Erst hierbei fiel mir der Montagearm auf, der obwohl ich mich daran hing nicht im geringsten zu bewegen war wie aus einem Stück. Die Neugierde hatte mich gepackt. Nach nun noch längereren Verhandlungen durfte ich mir leihweise ein ganzes Gelenk abmontieren.
Zuhause angekommen begann ich unverzüglich die Getriebe zu zerlegen um der Spielfreiheit auf den Grund zu kommen. Aufgeregt entdeckte ich dann
innen die Harmonic- Drives. Dadurch entpuppte sich der Montagearm als ideale Basis für eine Astronomische Montierung.Erste Versuche mit der Meßuhr bestätigten dies. Null feststellbares Spiel !!
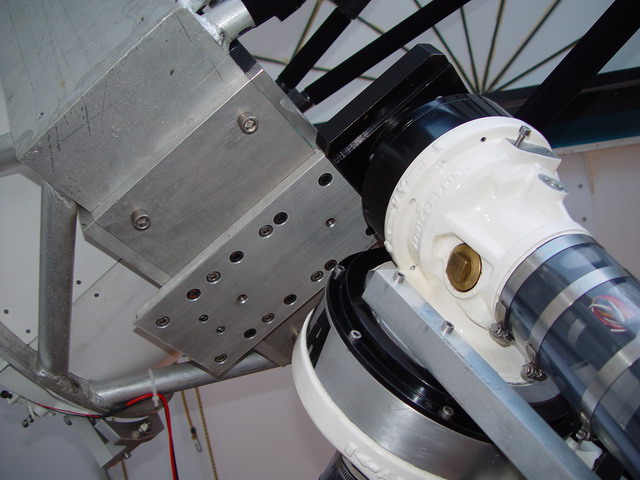
Ich habe die groben Kegelräder des Winkeltriebs einfach demontiert da diese nicht benötigt werden. Die Wellen der Harmonic- Drives habe ich
direkt starr mit SECM-4 Schrittmotoren
und Planetengetrieben 40 : 1 verbunden. Die Harmonic- Drives haben eine Untersetzung von je 80 : 1 woraus sich gesamt 3200 : 1 ergibt. Mit der 30 Volt Version der FS-2 vom Michael Koch und voller Stromstärke kann ich ohne montierte Gegengewichte mit 850 facher Geschwindigkeit schwenken. Bei reduzierung der Versorgungsspannung der FS-2 auf 12 Volt halbiert sich dieser Wert da die Schrittmotoren nicht mehr folgen können. Allerdings habe ich festgestellt, daß nach dem ich das System mit Gegengewichten ausbalanciert hatte selbst bei 12V wieder Schwenks mit 850 fach möglich sind. Die Ursache liegt einfach darin daß dann die Schrittmotoren weniger Drehmoment abgeben müssen und sich nicht mehr verschlucken. Die Harmonic- Drives sind nicht selbsthemmend..
Mein 16er läuft mit 850fach fast zu schnell, denn wenn CCD- Kameras usw am OAZ hängen und man drückt mal schnell im Dunkeln Go- To dann kann es
gefährlich werden. Das Laptop hing schon mal schräg nach oben am Kabel..
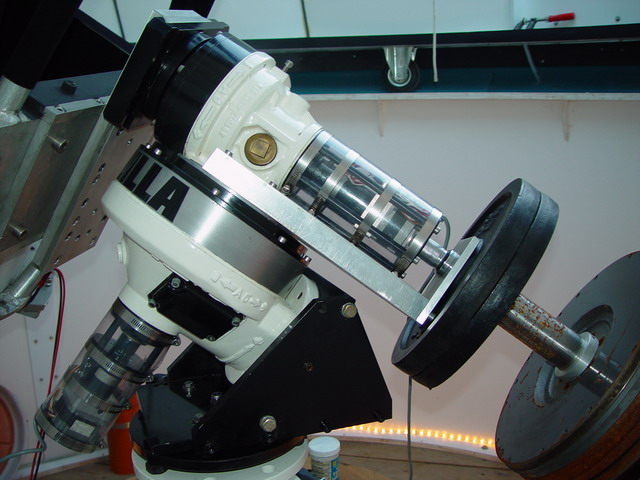
Mechanisch lassen sich die Getriebe mit 5500Nm belasten. Es sind 2 x 230mm
Kegelrollenlager in RA vorgespannt verbaut. In DE etwa 180mm. Ich schätze daß so eine Einheit mal 25000 DM gekostet hat.
Die Montierung läuft sehr ruhig und Schwingungsarm. Allerdings ist der periodische Fehler mit etwa 30S sehr groß. Da sich der Fehler relativ
gleichmäßig auf eine Zeit von 18min vertweilt aber nicht so tragisch
Mit dem C8 und seinem geringen Gewicht und kurzem Hebelarm, fiel mir kein Spiel auf. Ich hatte sogar so feste am C8 hin und hergezogen daß ich
schon Angst hatte den Tubus zu beschädigen
Seit der 16er aufgesattelt ist kann ich mehr zu der Genauigkeit sagen:
Hier habe ich nun am OAZ einen Hebelarm von 180cm und da offenbart sich ei Spiel in DE. Der Tubus lässt sich mit etwas Kraftaufwand etwa 1cm
hin- und herdrücken kehrt aber immer schön in seine Ursprungslage auf 4Sek genau zurück. Als ob zwei starke Gummiseile dazwischen sind
Beim Autoguiding müsste jetzt theoretisch ein riesen Backlash eingestellt werden. Dem ist aber kurioserweise nicht so. Alle Getriebespielparameter
stehen auf null und die Montierung reagiert sofort. Auch die Positioniergenauigkeit mit Go- To liegt selbst bei Umschlagschwenks von Ost nach West innerhalb von 30Sek.
Da das Getriebe nur eine Untersetzung von 80 : 1 hat gehört es nicht zu den allergenauesten von Harmonic Drive da die Zahnmodule doch Verhältnissmäßig grob sind. Kann auch daran liegen daß die Getriebe schon ein langes Arbeitsleben in der Fertigung hinter sich haben. Jedenfalls habe ich eine Langzeitbelichtung mit weglaufender DE- Achse gemacht und da sieht man sehr gut die periodischen Fehlerkurven. Seltsame Form oder? Schwierigkeiten bereiten die kleinen Zacken in der Kurve die sind schlimmer wie der Gesamtfehler da diese schnell auftreten ca 4Sek. Leider kann man die PEC bei der FS-2 immer noch nicht speichern. Deshalb arbeite ich ohne denn jedesmal 18min PEC aufzeichnen ist mir zu lästig. Ausserdem müßte dafür eine Nacht mit Topseeing her, da die Seeingfehler mitgeschrieben werden
Ich integriere im Moment mit höchstens einer Sekunde und habe so die Besten Ergebnisse erzielt.
Siehe Funktionsweise der Getriebe: http://www.harmonicdrive.de/de/1_6_2.htm
|